

EU Research Project

This project has received funding from the European Union’s Seventh Framework Programme for research, technological development and demonstration under grant agreement no. 266470
Scientific contact
Max Planck Institute for Biological Cybernetics
 heinrich.buelthoff[at]tuebingen.mpg.de
heinrich.buelthoff[at]tuebingen.mpg.de
Newsletters
 Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015
Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015

Objectives
Personal Aerial Transportation System
Several issues need to be resolved before a Personal Aerial Transportation System can be realised: an effective human machine interface (HMI) and Training needs to be created, full or partial autonomous behaviour of a flying vehicle needs to be established (which reduces the risk to the pilot and enables the PAV to be flown by the average person), and finally the social and economical impact of a PAV and its ideal design for acceptance by society at large needs to be investigated.The myCopter proposal specifically addresses these points with the goal of designing Personal Aerial Vehicles and an effective, efficient and user-friendly Personal Aerial Transportation System. The myCopter project aims to make specific advances in three major research areas:
- User-centred Human Machine Interface and Training
- Automation
- Socio-technological assessment.
Equipment
The research projects will be conducted by the highest level of European expertise with state of the art equipment: unmanned aerial vehicles (UAVs) for incremental developments of automation, and three flight simulators (one airborne, two ground-based). Finally, in addition to implementing advances of automation into UAVs and our HMI into our ground-based flight simulators, we aim to implement aspects of our automation technology and HMI design into DLR's Flying Helicopter Simulator.
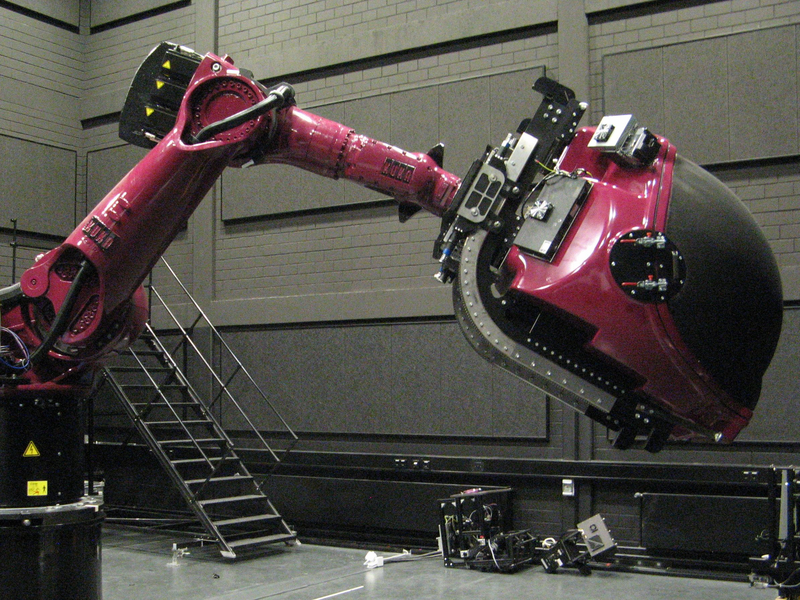
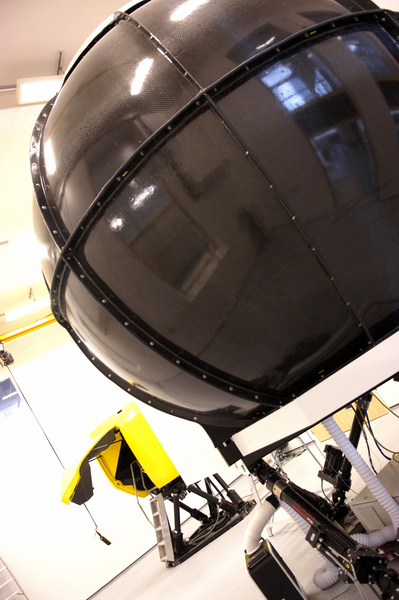
- CyberMotion Simulator

- Flying Helicopter Simulator


- HeliFlight R
Goals
- Human-aircraft interaction, including training issues: the interaction of the human with a PAV is of crucial importance. In general, the vehicle will be controlled autonomously, but it is anticipated that the pilot would prefer to have some control on the vehicle’s movement. PAVs need a human machine interface that considers human perception first and foremost and that allows for fast and efficient training of pilots. myCopter will investigate the human-machine interface and training issues that surround the use of PAVs and recommend solutions for them.
- Automation of aerial systems in cluttered environments: the PAV should be autonomous to a very high degree. This would include navigating in a potentially cluttered environment, where obstacles need to be avoided and where picking a landing spot is crucial for a safe arrival and departure. Also, PAVs would have to be able to avoid mid-air collisions with other uncontrolled traffic and potentially fly in groups along highways, for example to minimise the impact on urban areas. The myCopter project aims at assessing how benefits of automation should be implemented while still providing the pilot the ability to feel in control.
- Exploring the socio-technological environment: PAVs will have a large impact on society and the social expectation of such a transportation system cannot be ignored. Questions arise as to what are the expectations of users and how they might deal with a new aerial traffic system. It is important to also interview regulators, existing airspace users and groups that represent the business of air transport.

- Unmanned Aerial Vehicle


- Quadcopter
