

EU Research Project

This project has received funding from the European Union’s Seventh Framework Programme for research, technological development and demonstration under grant agreement no. 266470
Scientific contact
Max Planck Institute for Biological Cybernetics
 heinrich.buelthoff[at]tuebingen.mpg.de
heinrich.buelthoff[at]tuebingen.mpg.de
Newsletters
 Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015
Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015

Project demonstrations
DLR Flying Helicopter Simulator

DLR's Flying Helicopter Simulator (ACT/FHS) is a modified EC135 helicopter that can simulate other aircraft in real flight. In myCopter it was used to investigate the flight dynamics and human-machine interface of a future PAV. The cockpit was equipped with a highway-in-the-sky display and a steering wheel for intuitive car-like control. This is the first helicopter to be flown with steering wheel.
Watch a video here.
here.
Watch a video
here.DLR steering wheel control

The helicopter simulator of the AVES simulator center was used for ground-based simulation and preparation of FHS flight tests. Like in the real helicopter the cockpit was equipped with steering wheel and highway-in-the-sky display. The flight dynamics of a future PAV were simulated and the guests could take a flight.
Watch a videohere.
Watch a video
here.MPI haptic simulator

We combined a Highway-in-the-sky displays with a haptic shared control framework to assist a non-expert pilot with force guidance cues during a flight through a tunnel trajectory. We have shown that this combination provides an easy-to-use control interface for flying a PAV. Participant could experience this themselves in a fixed-base simulator.
Watch a videohere.
Watch a video
here.UoL PAV desktop simulation

We demonstrated the conventional rotorcraft response types and the practical flying route used for designing the training requirements. The demonstration aimed to show the response type requirements for likely PAV pilots with varying levels of flying skill in order to ensure safe and precise flight and also the evaluation methodology used for assessing the developed training syllabus.
Watch a videohere.
Watch a video
here.ETHZ vision-based navigation
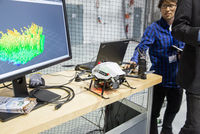
Automation of take-off and landing relies on accurate knowledge of variables, such as the position, velocity and orientation of the vehicle. While GPS is a popular sensor choice in open spaces, it suffers from accuracy issues in urban environments. We therefore use cameras to estimate both the state of the vehicle and its surrounding obstacles. The demo showed a Micro Aerial Vehicle (MAV) that solely uses a camera system for stabilization and navigation. It can be steered by an untrained pilot with a joystick, while it avoids crashing into obstacles.
Watch a videohere.
Watch a video
here.EPFL-CVLAB landing place assessment
We used high level image features to characterize appropriate landing places, by evaluating weather constellations of these features coherently depict viable landing places. Our features take advantage of constant image regions that for continuous and compact regions that are ideal landing locations. This demonstration showed our approach with videos and posters.
Watch a videohere.
Watch a video
here.EPFL-LIS collision avoidance swarm demo

We performed a multi-MAV collision avoidance experiment. After takeoff, all MAV were placed on a colliding course. We showed the effect of our strategy where every MAV computes a collision-free trajectory by itself based only on locally available information.
Watch a videohere.
Watch a video
here.KIT World Café
Participants could join our World Café and see what others thought about PAV traffic in their backyard or on their daily commute route. Everyone was invited to imagine their personal use of PAVs and to discuss it with us and other guests while enjoying a cup of coffee.
Watch a videohere.
Watch a video
here.