

EU Research Project

This project has received funding from the European Union’s Seventh Framework Programme for research, technological development and demonstration under grant agreement no. 266470
Scientific contact
Max Planck Institute for Biological Cybernetics
 heinrich.buelthoff[at]tuebingen.mpg.de
heinrich.buelthoff[at]tuebingen.mpg.de
Newsletters
 Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015
Newsletter #1, September 2011
Newsletter #2, March 2012
Newsletter #3, November 2012
Newsletter #4, August 2013
Newsletter #5, August 2014
Newsletter #6, March 2015

ETHZ vision-based navigation
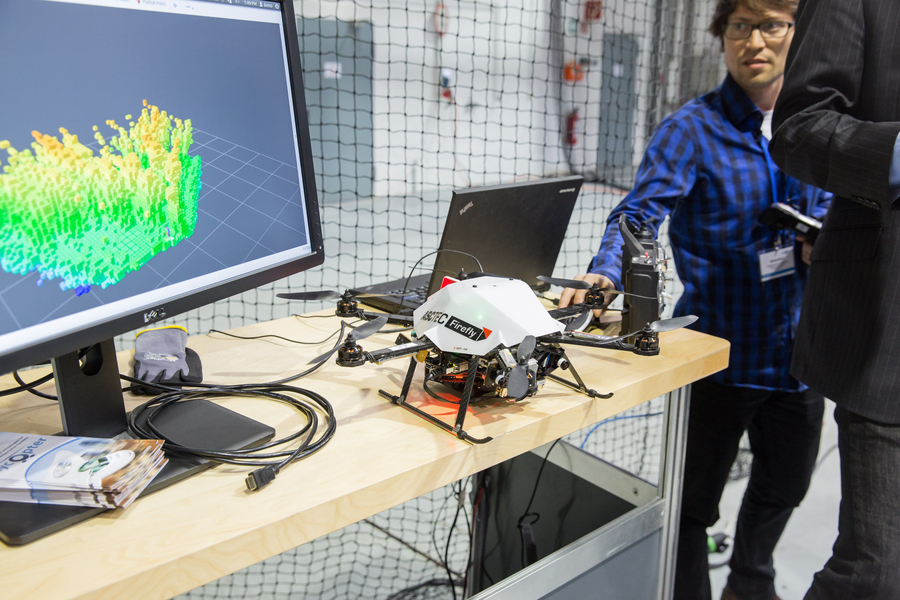
Automation of take-off and landing relies on accurate knowledge of variables, such as the position, velocity and orientation of the vehicle. While GPS is a popular sensor choice in open spaces, it suffers from accuracy issues in urban environments. We therefore use cameras to estimate both the state of the vehicle and its surrounding obstacles. The demo showed a Micro Aerial Vehicle (MAV) that solely uses a camera system for stabilization and navigation. It can be steered by an untrained pilot with a joystick, while it avoids crashing into obstacles.